





















すべての製品
スウィングタイプ回転音声コイルモーター 運動の高周波








商品の詳細
| 保証 | 3ヶ月から1年 | 使用 | ボート、車、電気自転車、UAVの3D印刷、顕微鏡、ロボット、医学の換気装置、光学プロジェクト |
|---|---|---|---|
| タイプ | マイクロモーター | トルク | 要求事項 |
| 建設 | 永久磁石 | 換算 | ブラシ |
| 保護する機能 | 完全に閉ざされた | 速度 (RPM) | 変速 |
| 連続電流 (A) | 1.5A | 効率性 | IE 1 |
| 製品名 | 振動タイプ ボイス・コイル・モーター | 名前 | 蘇州のボイス・コイル・モーター |
| サイズ | 70mm | 色 | 銀/黒 |
| ポイント | 小型電動機 | 梱包 | カートン |
| 港 | 上海港 | ||
| ハイライト | スウィング型回転音声コイルモーター,回転式音声コイルモーター 12v,12v DCモーター 高周波 |
||
製品の説明
スウィングタイプ 音声コイルモーター 12v DCモーター 運動の高周波
製品説明
スイミングボイスコイルモーターの設計とパラメータ計算は 複雑なプロセスで モーター構造,磁場分布,コイルレイアウト振動音声コイルモーターのパラメータを設計し計算するための一般的な手順は以下のとおりです.
1要求分析: 必要な回転角度,速度範囲,負荷要件などを含むモーターのアプリケーション要件を決定する.
2モータータイプ: 適用要件に応じて,トルションタイプ,スイングタイプ,または多度自由タイプなどの適切なスイングモータータイプを選択します.
3磁場分析:磁場の分布と強度を決定するために磁場分析を行う.これは,有限元素分析 (FEA) などの方法によってシミュレーションおよび計算することができます..
4コイル設計:コイルのレイアウトを設計し,コイルの巻き込み数,回転数,ワイヤル仕様等を決定します.コイルの設計はトルク,応答速度,そして,モーターの効率.
5機械分析: 機械分析を行い,モーターの回転慣性,負荷,摩擦などの要因を考慮し,必要なトルクと動力特性を見極める.
6パラメータ計算:
電流計算: 必要なトルクとトルク常数に基づいて必要な電流を計算する.
抵抗とインダクタンス計算: コイルの材料と幾何学的パラメータに基づいて抵抗とインダクタンスを計算する.
ループ時間定数計算:抵抗,誘導力,機械特性に基づいて応答速度を推定するためにループ時間定数を計算する.
7フィードバックシステム: 閉ループ制御が必要な場合は,エンコーダー,ホール効果センサーなどの適切なセンサーとフィードバックシステムを設計します.
8制御戦略: 必要な動きと安定性を達成するために適切な制御戦略を設計する.
9熱管理: 動作中にモーターによって発生する熱を考慮し,適切な動作温度を維持するための熱散電システムを設計する.
10. シミュレーションとシミュレーション:設計パラメータの合理性を検証し,設計を最適化するためにMatlab,Simulinkなどのシミュレーションとシミュレーションツールを使用します.
11製造と試験: 設計パラメータに基づいてモータープロトタイプを製造し,実際の試験を行い,必要な調整と最適化を行います.
スイミングボイスコイルモーターの設計とパラメータ計算は,モーターエンジニアリングなどの複数の分野の知識の組み合わせを必要とする複雑なプロセスであることに注意する必要があります.電子磁気複雑なアプリケーションでは,プロの電磁シミュレーションソフトウェアと制御システム設計ツールを使用して設計と最適化を支援することが必要かもしれません.
技術パラメータ:
応用:
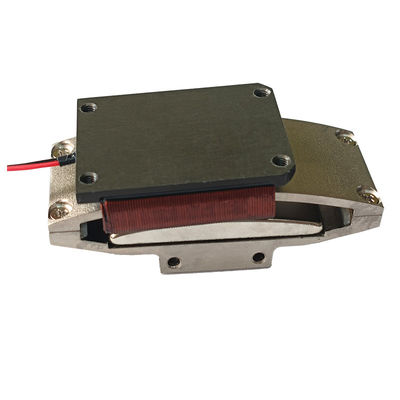
SUPT振動音声コイルモーターシリーズは,長方形のシリーズ製品の技術を採用し,長方形のシリーズ製品を曲げ,特定の優先角度位置位置システムを形成します.典型的なトルクは100度であり,トルクは50N · mですスウィングタイプ製品は,通常,鏡ロケータ,スウィングタイプバルブブレーキ,スウィングタイプポジショニングシステム,フライトコントローラーなどでレーザー技術で使用されます. U型線形モーターとフラット型線形モーターと比較して,より優れた高周波応答を提供できます.高速回転線形運動音声コイル線形モーターの制御はシンプルで信頼性があり,通勤装置はなく,寿命が長い.
詳細な画像
![]()
認定
私たちの会社
スズーユナイテッド精密技術株式会社 (SUPT Motion) は,音声コイルアクチュエーターの線形モーターと線形モータープラットフォームを提供することに専念したエンジニアリングおよび製造会社です.SUPT Motionは標準的な販売製品だけでなく,Madiumと高容量のカスタムOEMソリューションも提供します主な製品は,音声コイルベースの線形および回転式アクチュエーターとブラシのない永久磁石型線形モーターです.
会社には強力なR&D能力があり,完ぺきな販売後のサービスシステムがあります.音声コイルモーター線形モーターとすべての種類の線形モーションプラットフォームを設計し,生産することができます.長年の経験により,我々の国際的なエンジニアリングと製造スタッフは,アジア,北米,音声コイルモーターと線形モーターの顧客とディーラー.
Suzhouの製造センターに拠点を置くことで,あなたのための大きなOEM生産要件にコスト効率の良いソリューションを提供することができます.技術の進歩を続ける 品質の向上を目指す顧客満足は我々のコミットメントです. 顧客満足は,私たちの目標です.私たちの厳格な品質部門と生産部門は,私たちの高い品質と安価な製品を保証します モーター より費用対効果の高い顧客に奉仕するために,それが強い競争力を持っているようにします.
よくある質問
1製造者ですか?
RE:はい,私たちは工場で100%メーカーです.
2- 引上げはどうしたらいい?
商品の詳細な要求事項,例えば仕様,量,梱包の詳細等を教えてください.
3いつまで手に入れるの?
通常,サンプルには 7~10日かかります.
大量生産には12~18日かかります
それはあなたの数量に依存します.
4試料で作れるか?
Re:はい,私たちはあなたのサンプルまたは技術図面によって生産することができます.
5支払条件は?
返品:T/T 50%を預金として,そして50%は出荷前に支払われます.残高を支払う前に,製品とパッケージの写真を表示します.
6配送の条件は?
EXW,FOB
わたしたち の 奉仕
サービス:
A. 技術指標と仕様をカスタマイズすることができます.
B.無料サンプル,貨物回収C. 満足のいく販売後サービス
D.柔軟なMOQ
選択する理由:
A.100%メーカー
B. 豊富な生産経験
C. 先進的な機械
D.厳格な品質管理システム
梱包と配送
もっと 製品
線形モーター:
![]()
線形モータープラットフォーム:
![]()
直角音声コイルモーター:
![]()
音声コイルモータープラットフォーム:
![]()
推薦されたプロダクト